「猫のキモチを可視化する」という難題に挑む

近年、猫と人間の関係は大きくアップデートされ、新たな時代が到来しています。
本連載「ネコラボ通信」は、電通のクリエイティブR&D組織「Dentsu Lab Tokyo」内に発足した猫専門イノベーションチーム「Neko Lab Tokyo」(以下、ネコラボ)のメンバーが持ち回りで登場。テクノロジーとアイデアを掛け合わせた、猫にまつわる最新プロジェクトやユニークな研究開発をお届けしていきます。
連載第5回目となる今回は、ネコラボ初のR&D「猫のキモチ可視化プロジェクト」のご紹介です。プロジェクトリーダーを務めたコミュニケーション・プランナーの中村と、Neko Lab Tokyoのリーダー宮下の共同執筆で、その試行錯誤の過程を振り返ります。
※本記事は、Dentsu Lab Tokyoの公式noteに掲載されたリポートを一部編集したものです。本記事および記事内の取り組みについて、麻布大学 獣医学部 動物応用科学科 特任助教 子安ひかり先生(現・日本女子大学助教)にご確認をいただいています。
なぜ猫のキモチなのか?
ネコラボ初のR&Dプロジェクトにふさわしいテーマは何なのか。メンバーからはさまざまなアイデアが出されました。
- 猫ならではの動きやゴロゴロ音を模したおもちゃ
- 猫が顔を洗うと雨が降るという言い伝えをヒントにした天気予報デバイス
- 室内飼いの猫が「外の世界」を体験できる映画
- 猫OKなお花を教えてくれるアプリ(ネコラボ通信・第2回で記事化)
……などなど。
メンバーが猫と暮らす中で感じる問題意識や取り組みたいテーマから議論を重ねた結果、どうしても避けては通れない一つの課題が見えてきました。
それが「猫の感情を可視化」すること。
猫に関わるサービスやプロダクトを開発したとして、それが良いものなのか否かを判断するのは、飼い主をはじめとする人間だけで良いのでしょうか。猫の幸せを思うのであれば、やはり猫の意見を反映させたい。そのためには、一定の客観性のある猫のキモチの指標を土台にしたいと考えました。
近年は「ペットの家族化」が進み、首輪やトイレで猫の健康管理するプロダクトなど、多くのペット向けソリューションが登場しています。ただ、「感情の可視化」というテーマに関しては、まだまだ発展の余地が大きい領域です。
今振り返ると、ずいぶん壮大な目標を掲げてしまったのですが、今後ネコラボとしてさまざまな取り組みをしていく上で、「本当に猫のためになっているのか?」を評価する手段を持つことは、大きな意義があるはずです。
可視化が実現した未来には、さらにそれを万人に理解しやすくするために「単位化」にもトライしたい。たとえば猫のキモチを表す単位「ジャラシ」を作り、おもちゃに大興奮しているときは「8ジャラシ」、窓外のちょうちょに興味を示しているときは「3ジャラシ」のような指標にする。そんな共通言語ができれば、猫向けプロダクト開発や、医療の現場にも役に立つかもしれません。
ちょうどその頃、電通サイエンスジャムさん(以下、DSJと表記。2026年1月に電通デジタルと合併)もペットの感情に注目していることを知り、共同研究が始まりました。データサイエンスと脳波などの生体情報の取得・解析や感性把握技術を強みとするDSJさんは、ネコラボにとって心強いパートナーです。
猫のキモチの測り方
私たちはまず、猫の感情を生体データから客観的に捉えようとしました。得られる可視化データや将来的に検討している指標を、よりニュートラルなものにすることが狙いです。そのためには、猫の感情と生体情報がどう結びついているかを理解しなければなりません。
猫の感情は、ホルモンや脳波、心拍数などに影響を与えるとされ、こうした反応は人を含む哺乳類に共通する生理的な仕組みです。獣医学の現場でスタンダードなホルモンを使った研究は、尿検査が必要で、日常的に扱うにはハードルがあります。ネコラボが目指したのは、飼い主さんや猫向け商品の開発担当者など、専門家でなくても可能な測定方法です。
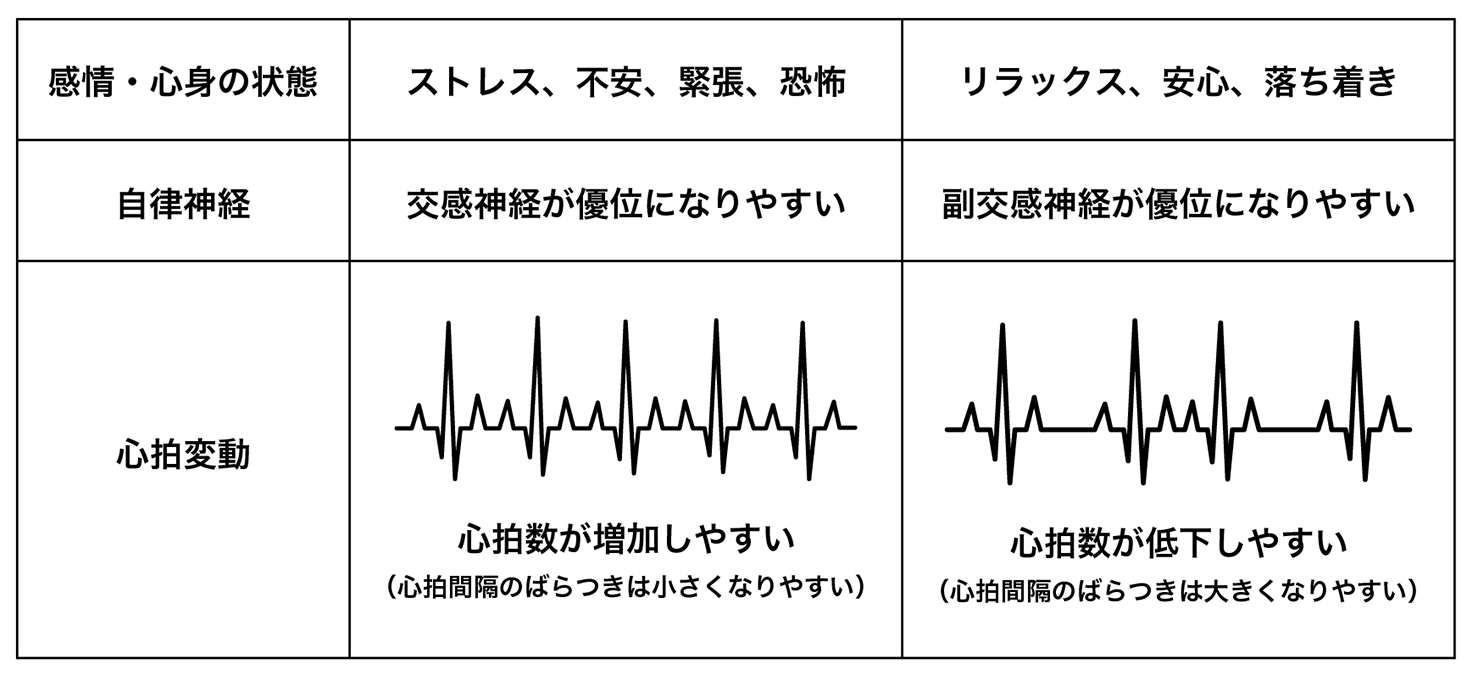
候補となった生体データの中で、可能性を感じたのが「心拍」。人間は不安や緊張時には交感神経が、安心やリラックス時には副交感神経が優位になりやすく、その変化は心拍変動に表れます。これらの仕組みは猫にも応用できるはずで、非侵襲で比較的精度の高いデータ取得を目指せる点も、心拍に注目した大きな理由でした。
一つじゃない心拍測定方法
動物の心拍測定には知識と経験が必要ですが、不慣れな私たちは、まず心臓の仕組みと電気の流れ、心電図の取り方、心電図の読み方を知ることから始めました。
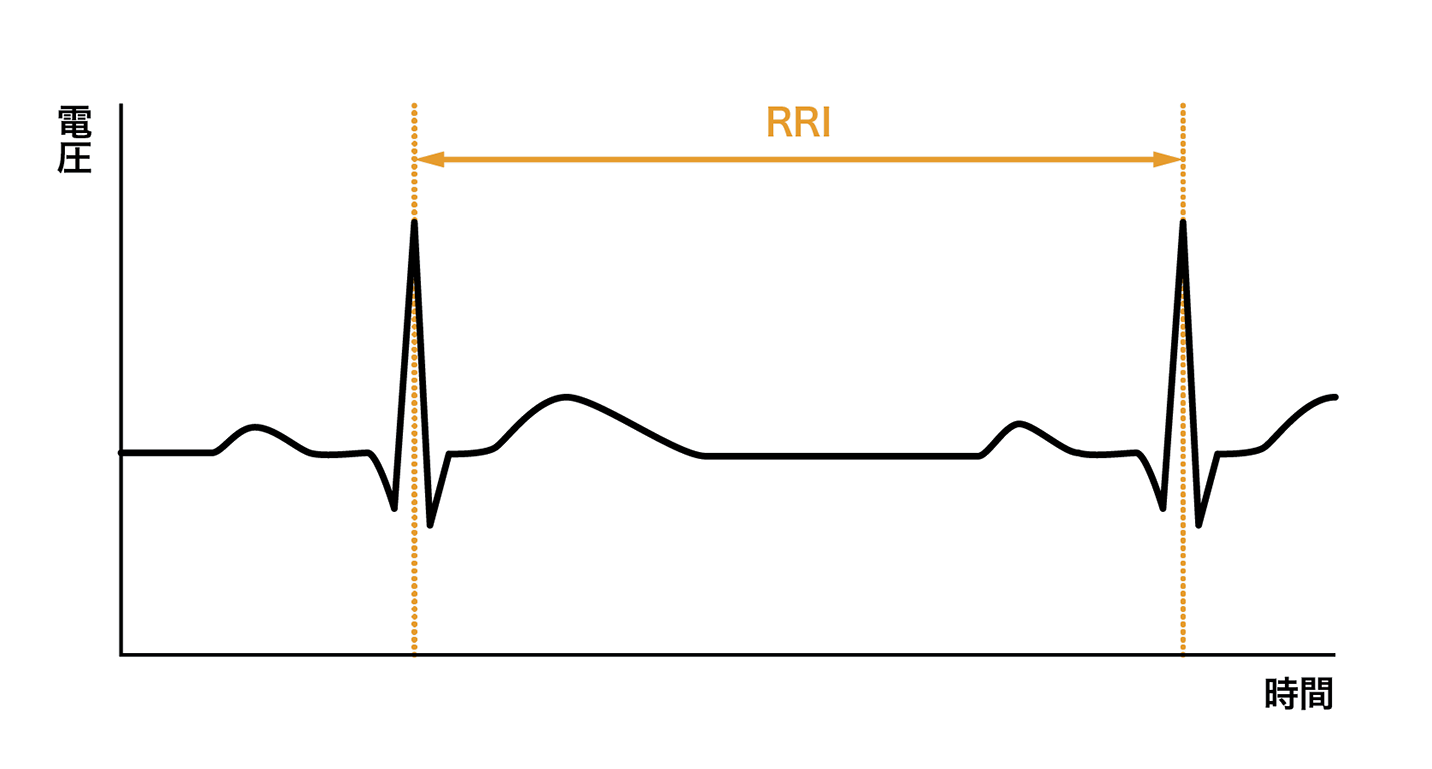
基本的な心拍測定は、心電図からRRI(1拍ごとの間隔)を計測し、そこから心拍数(HR)や心拍変動(HRV)を算出します。HRVを解析すると、自律神経のはたらきの傾向が見えてくるため、感情との関係を探る手がかりになります。
また、心拍は「何で測るか」によって実用性が変わるため、主な計測方法をリサーチしました。
- 電気式心拍センサー(ECG):健康診断で使われる、胸や手足に電極をとりつける方式。心臓が動くときに出る微弱な電気信号を体表から拾います。
- 光学式心拍センサー(PPG):LEDの光を皮膚に当て、血流による反射光の変化から心拍を読み取る、スマートウオッチなどに使われる方式。
- 心音センサー:いわゆる聴診器のように、心臓の音や胸の振動を拾って測る方法。
- 加速度センサー:ペットの首輪デバイスでよく使われるもので、体の動きや揺れを検出します。
- レーダー(ミリ波・ドップラー)センサー:非接触で体のわずかな動きから呼吸や心拍を捉えます。人向けでは、病院等の見守り用途で実用化が進んでいます。
どの方法にも一長一短があり、何より大事なのは猫との相性です。そこで複数の心拍測定機器メーカーさんから機材をお借りしてメンバーの飼い猫で計測実験を開始しますが、早々に大きな壁にぶつかることになります。
猫ならではの難しさ
まず試したのは、小型の電気式心拍センサー。人間であれば胸に貼るだけで心拍が測れるデバイスで、猫にも応用できる見立てです。協力してくれたのは宮下家のマジョさん。しかし、長い毛が邪魔をしてうまく測定できません。申し訳ないけれど、トリマーさんにお願いしておなかの毛を剃ってもらうことにしました。さらにセンサーを固定した術後服を着てもらう作戦に変更すると、波形が確認できるようになりました。

ただ、今度は機器とおなかに隙間ができて計測が安定しません。かといって締めつけると負担になるし、そもそも慣れない服を着た状態のデータを平常時の心拍としてよいのかという疑問も残りました。
続いて検証したのは、こちらも人間用で、脳波や筋電図なども測定できるワイヤレス生体計測装置。両前足、後ろ足の3カ所の肉球に電極を取りつける方法で心電図を測定しました。猫の肉球は、毛に覆われていないため皮膚が露出しており、また汗腺があることから電気を通しやすく測定には適した箇所です。協力してくれたのはDSJ篠塚家のらんちゃん。このプロジェクトの開始と同時期に迎えたばかりの、子猫さんです。

短時間の測定であれば意外とおとなしく、心電図のピークも比較的はっきり確認できました。一方で、安定した測定には抱っこした状態を維持する必要があります。そのため、自由な状態での連続測定にはまだ課題があり、現時点ではバリデーション用途(確からしさを確かめる用途)としての活用が現実的です。
高性能のモーションセンサーを用いた首輪型のプロダクトもテストしました。このタイプは日常的に自然な状態のデータを取れるウエアラブルデバイスとして有力な選択肢です。協力してくれたのは首輪OKな澤井家のたねびちゃん。

実験の結果、安定してデータを取得できる手応えはありましたが、アプリへのデータ反映には一定のタイムラグがある仕様のため「いまこの瞬間に心拍がどう変化したか」を捉える用途には不向きです。リアルタイム性は限定的なものの、首輪をつけてくれる猫の日常の変化や傾向を追う手段としては有効に活用できそうです。
さらに、動物用のデジタル聴診器も試しました。心臓や肺の音を測定・収集・分析できる機器で、健康管理にも使われています。猫の心臓は左側の5番目と6番目の肋骨の間くらいにあるため、脇あたりに聴診器を当てると測定でき、猫への負担も少なそうです。野田家のショーンくん、中村家のぐりちゃん、らんちゃんの3名の協力が得られました。
子猫のらんちゃんでは、比較的きれいな心音を得ることができました。対して大人の猫では毛量や皮膚の厚みの影響もあってか、測定は安定しません。加えて、ゴロゴロ音などのノイズが入りやすく、そもそも聴診器を当てられることを嫌がる子もいて、やはり猫の個体差への対応に課題が残りました。
これらの実験を通して痛感したのは、「猫は犬と比べて研究が遅れている」と言われる理由でした。猫のふわふわの毛は、実験では大きなハードルになります。加えて、猫はストレスを感じやすい動物で、じっとすることが苦手な子も多く、個体差が大きい。その場合、データが平常時の状態を反映しているのか判断しにくく、「どんな猫でも」「誰が測定しても」安定した計測を実現すること自体が簡単ではありません。猫ならではの性質が、研究の難しさそのものにつながっていたのです。
しっぽの動きと心拍の意外な関係
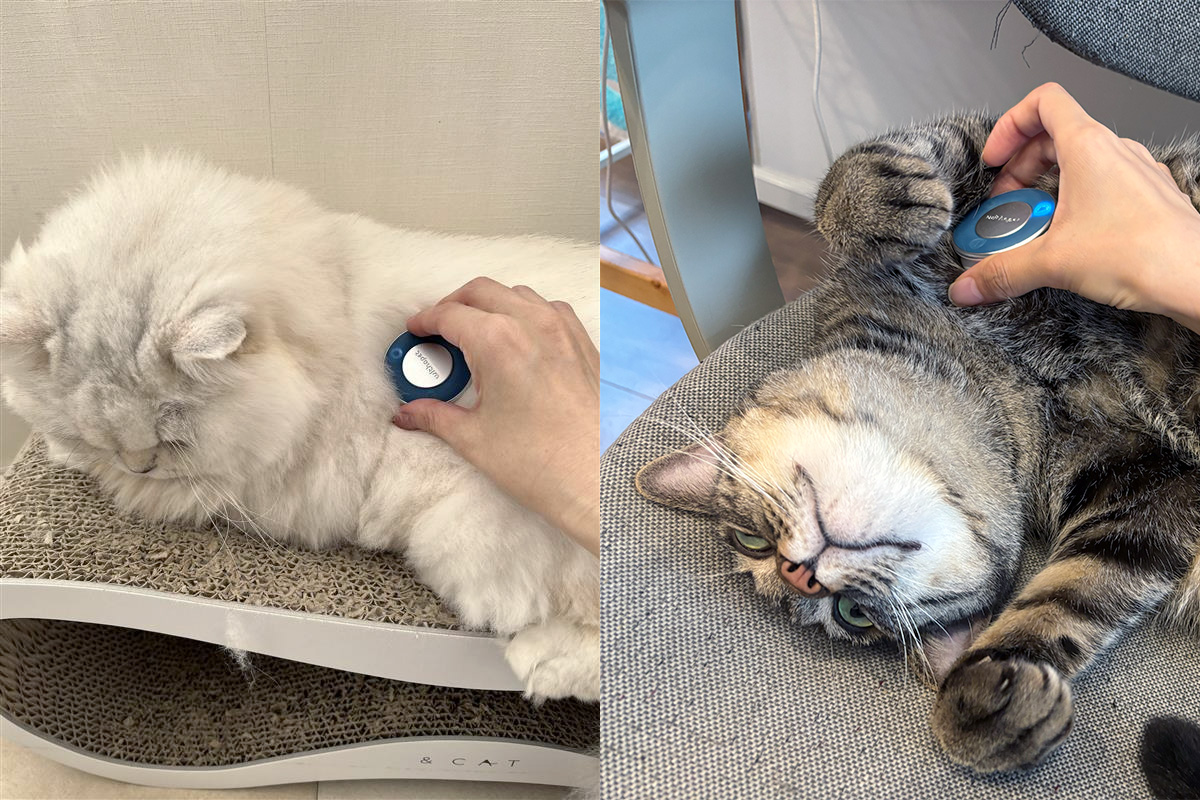
最後に試したのは、シート状の電極に4つ足で立つことで肉球から測定できる犬・猫用心電計です。生理食塩水でぬらしたシート上に猫を動かないように立たせると、スムーズに測定できました。この方式だと抱っこも不要で猫への負担も少なそうです。そこで、大好きなおやつを食べるときの心拍変化を調べてみると、意外な結果が得られました。

食べはじめの心拍数は安静時とほぼ変わらず(122 bpm)、食べているうちに少しずつ上がっていき(146 bpm)、食べ終えた直後に最も高くなり(166 bpm)、食後15分もすると正常心拍数に戻ったのです(130 bpm)。
見た目では、おやつを前にしたときのほうが明らかにしっぽを立てて興奮しています。ところが実際には、しっぽを降ろした食後のほうが心拍数は高い。つまりしっぽの動きと心拍は、必ずしも連動しない可能性があり、心拍測定は見た目の行動だけでは捉えきれない猫の状態を知る手がかりになりそうです。
今回は1匹での検証でしたが、繰り返し試しても似た傾向が見られました。夢中で食べているうちにキモチが高ぶっていき、食後の余韻に浸る時間帯が最高潮、というなんともかわいらしい結果です。
こうしたテストを経て、猫への負担と精度の観点から計測方法を絞り込んでいきました。
猫研究の専門家に話を聞いてみた
ネコラボにはテクノロジーに強いメンバーもいますが、猫の生態や猫研究に関しては素人です。方針や課題が見えてきたため麻布大学獣医学部 動物応用科学科 特任助教(現・日本女子大学 助教)である子安ひかり先生に相談することにしました。
子安先生は、「なぜネコがヒトの伴侶動物になったのか」「その共生がお互いに何をもたらすのか」を、行動学、生理学、社会学的視点から研究されている、国内を代表する猫研究者のお一人です。本プロジェクトについても、「チャレンジする意義はある。猫の心拍を気軽に測定できるようになれば今後の研究にも役立つはず」と監修を引き受けてくださいました。

また感情の可視化には、生体情報と行動観察など、複数の指標を組み合わせることが重要だと教えていただきました。さらに、しっぽや耳、体全体の動き以上に注目すべきは「表情」で、特に「瞳孔」に感情の変化が表れやすいとのこと。最近では、CatFACS(Cat Facial Action Coding System)という「猫の顔の動きを解剖学ベースで客観的に記述する手法」を使った研究が進んでいるそうです。
深層学習による猫の行動変化の定量化
子安先生から複数の指標を組み合わせることの重要性を教わり、行動観察の探索も開始します。担当してくれたのはDSJの篠塚さん。
動物の姿勢や動きを動画から解析するツール「DeepLabCut」の四足動物向けモデル SuperAnimal-Quadruped を用いて、メンバーの飼い猫動画から耳、しっぽ、鼻先などの位置をフレーム単位で推定し、その座標変化から姿勢や動きの定量化にトライしました。
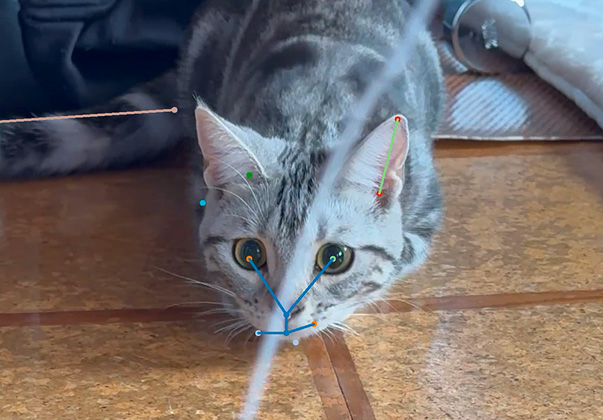
追加学習を行わなくても、既存モデルで姿勢や各部位の動きはある程度推定できました。ただし、動画では奥行きの判断が難しく、細かな向きや物陰に隠れた部位の推定は不安定になりがちです。自由に動き回る猫を追い続けるには、トイレや食事など撮影場面をある程度限定したり、複数台のカメラを用いる工夫が欠かせないと感じました。
さらに、各メンバーが撮影した動画を見て、「いま猫はこういう状態(キモチ)かもしれない」という解釈をひもづけることで、行動と感情の対応関係を探っていきました。
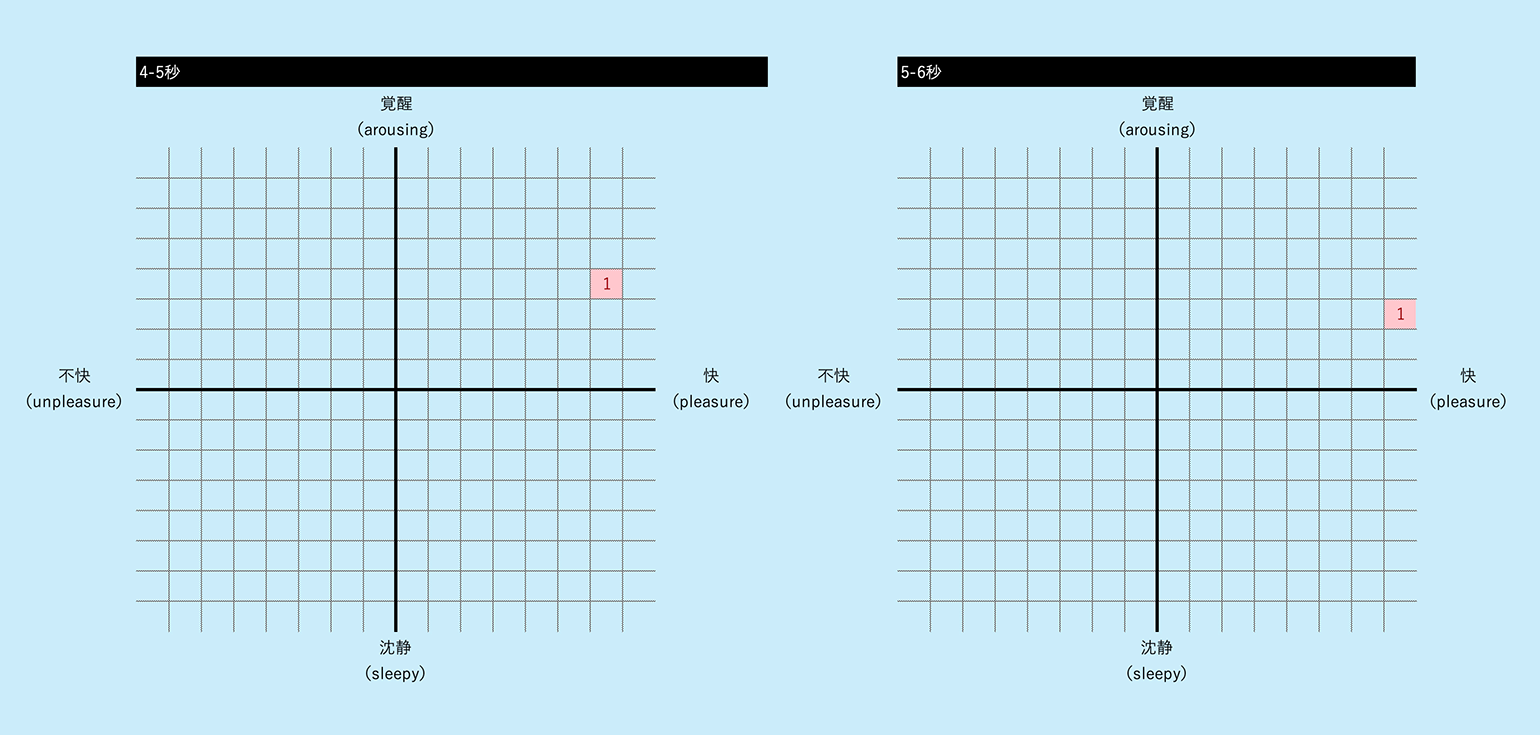
マッピングには、人の感情を「快-不快」と「覚醒-鎮静」の2軸で表現する心理学分野の理論・ラッセルの円環モデルを応用。人間と猫の感情は必ずしも対応していない難題もありますが、将来的には「猫版・ラッセルの円環モデル」が作れるかもしれません。
犬研究の専門家にも話を聞いてみた
その後、子安先生と同じく動物行動学を専門とされ、犬と人の絆やオキシトシン研究の第一人者である、麻布大学・菊水健史教授にもお話を伺うことができました。
興味深かったのは、犬の知見を猫にそのまま当てはめるのは難しいということ。犬には長年の研究蓄積がありますが、猫は行動特性が異なります。子安先生の絆行動に関する研究でも、ホルモンの状態から、犬は仲間と行動する傾向が強い一方、猫は単独行動を好むことが示されており、獣医療でたびたび言われる「猫は小さな犬ではない Cats are not small dogs.」という言葉を裏づける結果になっていました。
心拍測定については、既存のペット向け「情動(学問分野では『感情』という言葉は使わないそうです)」計測機器には課題が多く、検討していた計測方針として間違ってないこと、将来的な猫用デバイスの開発に向けた具体的な助言も得られました。
また菊水先生からは、猫が「楽しくて興奮している」のか「怖くて緊張している」のかは心拍だけでは見分けにくいため、行動から情動を読み解くラベル付けをする必要があり、そのためには飼い主の実感を取り込むことが重要な設計ポイントになる、との指摘もありました。
他にも多岐にわたる貴重なインプットがあり、大変勉強になったけれど少々パンク気味のメンバーたち……。プロジェクトをどう進めていくべきか、頭を悩ませることになります。
人は猫のキモチをどこまで読み取れるのか
菊水先生のコメントや篠塚さんの実験にもあった「飼い主の解釈や実感」。猫は言葉を持たないので、人間の判断を目安にするしかありません。
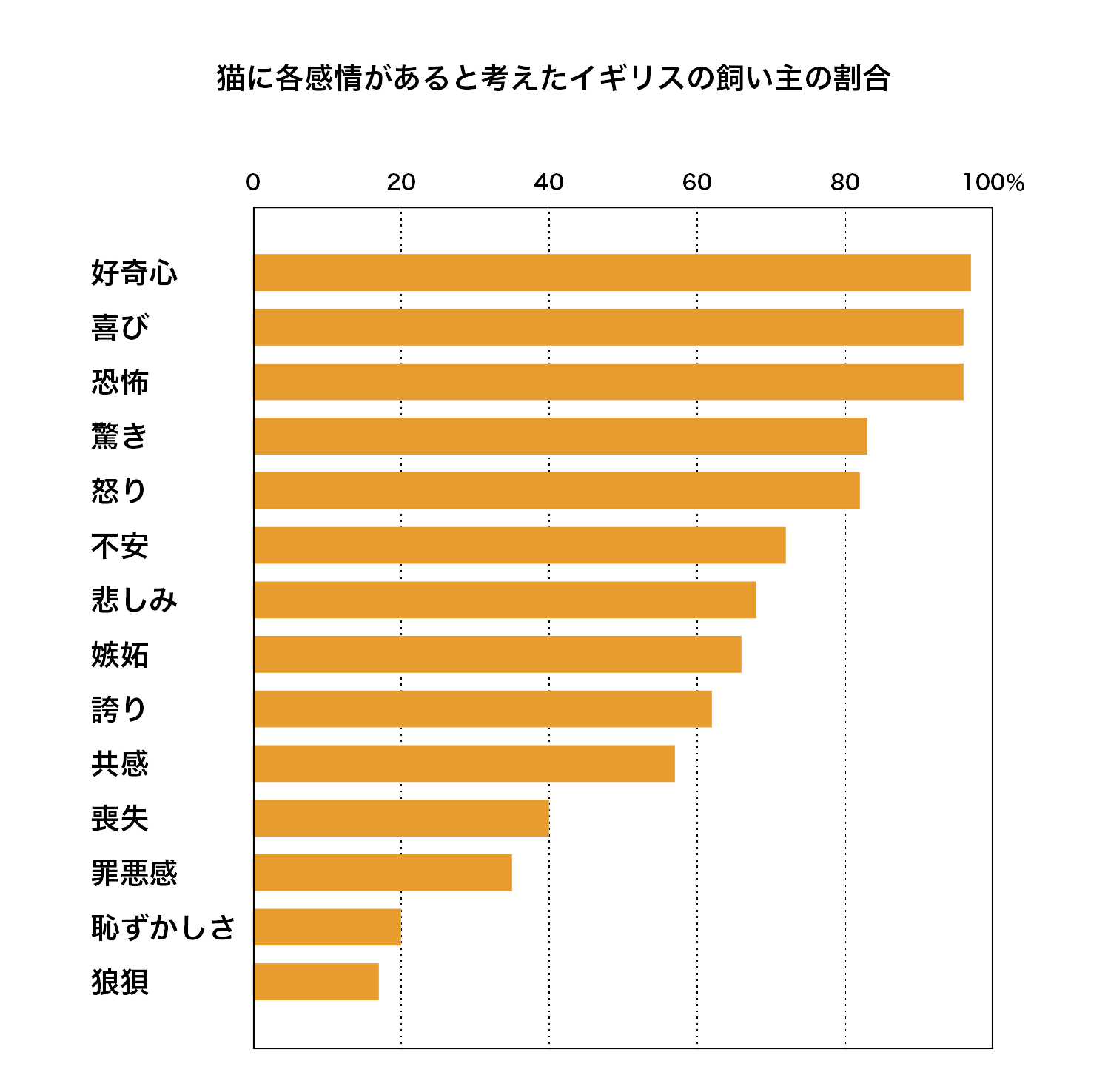
動物行動学者のジョン・ブラッドショー氏の著作「猫的感覚」で紹介されている研究では、イギリスの飼い主が猫にさまざまな感情を見いだしている一方、その読み取りには大きなばらつきがあることが報告されています。
そこで、2025年12月に開催したR&D成果発表イベント「Dentsu Lab Tokyo OPEN LAB 2025」で、来場者のみなさんが猫の行動からどのように感情を読み取るのかを知るため、簡単なアンケート調査を実施することにしました。

アンケートから見えてきたこと
ネコラボメンバーの飼い猫に協力してもらい、それぞれ異なる行動をしている様子を短い動画におさめ、その動画から「この猫はどんな気持ちだと思うか」「どこを見てそう感じたか」を複数の選択肢から回答してもらう内容です。ありがたいことに、99名の方から回答が集まりました。

動画を見てこの猫はどんな気持ちだと思いますか?
□落ち着き □満足 □喜び □興奮 □興味 □警戒 □恐怖 □怒り □フラストレーション □その他
どの部位を見てそう感じましたか?
□目 □口 □耳 □前脚 □後脚 □しっぽ □声 □その他
※アンケートの選択肢(複数回答可)
「どんな気持ちだと思うか」との質問に対しては下記のような回答が得られました。
動画A:落ち着き(49.5%)、警戒(27.3%)、フラストレーション(20.2%)
動画B:興味(45.5%)、興奮(33.3%)、警戒(27.3%)
動画C:落ち着き(80.8%)、満足(52.5%)、喜び(24.2%)
動画D:興奮(88.9%)、興味(55.6%)、喜び(39.4%)
動画E:興味(37.4%)、フラストレーション(31.3%)、興奮(19.2%)
動画F:興味(83.8%)、警戒(59.6%)、興奮(41.4%)
※99名のうちその選択肢を選んだ人の割合。上位3感情のみ表示(複数回答可)
たとえば動画Cに対する回答の上位は「落ち着き」「満足」「喜び」、動画Dは「興奮」「興味」「喜び」と似通っており、方向性はある程度絞りこめそうです。一方、動画B、E、Fはいずれも「興味」がトップスコアなのに、「警戒」や「フラストレーション」も上位にランクされており、人によってその状態がポジティブなものかネガティブなものか解釈が異なることがわかります。
つづいて「どこを見てそう感じたか」の回答結果も見てみましょう。
動画A:目(68.7%)、しっぽ(45.5%)、耳(16.2%)
動画B:しっぽ(82.8%)、目(57.6%)、耳(13.1%)
動画C:前脚(62.6%)、目(40.4%)、後脚(23.2%)
動画D:前脚(74.7%)、目(31.3%)、しっぽ(23.2%)
動画E:声(82.8%)、しっぽ(15.2%)、前脚(9.1%)
動画F:前脚(91.9%)、しっぽ(49.5%)、目(21.2%)
※99名のうちその選択肢を選んだ人の割合。上位3部位のみ表示(複数回答可)
動画Eの「声」以外は、ほぼ「しっぽ」「前脚」「目」に集約されています。「しっぽ」「前脚」は行動が真っ先に現れる部位のため納得感があり、「目」が上位に入ったことは子安先生の指摘と重なる結果となりました。約180度動くとされ、「イカ耳」という言葉もある「耳」は思いのほか伝わりづらく、「口」に至ってはほとんど選ばれませんでした。
またこのアンケートでは、「飼育経験の有無」を尋ねており、猫と暮らした経験がある人とない人で、行動の受け取り方に差があるかも見てみました。99名のうち、33名が飼育経験ありです。
結果として全体傾向は大きく変わらなかったものの、細かな読み取り方には差がみられました。たとえば動画Bを「フラストレーション」と見た経験者は24.2%、未経験者は6.1%。動画Eでも「フラストレーション」は経験者48.5%、未経験者22.7%で、(当然といえば当然なのですが)経験者のほうが複雑な状態を読み取りやすい傾向がうかがえます。
私たちは猫のキモチを「なんとなく分かったつもり」になっていますが、その読み取りは思った以上に主観の影響を受けているようです。より精度の高い検証につなげていくためには、サンプル数を増やし、回答者の属性や評価のばらつきも含めて、より丁寧に見ていく必要があります。

好奇心で、猫を救えるか?
「猫のキモチを知りたい」。そんな素朴な好奇心から始まった挑戦は想像以上に困難でしたが、多くの収穫もありました。心拍と感情の関係について知見や、行動と心拍が必ずしもリアルタイムに連動しない可能性。専門家の先生方からの示唆。そして、猫が好きだという思いで集まったメンバーが、猫の生態を科学的な視点から見つめたことそのものが、大きな意味のある経験でした。
感情の可視化には多くの手がかりが必要ですが、それらを同時に扱おうとすると難度が一気に上がることも強く実感しました。次のステップではテーマを絞り、できることから一つずつ検証を重ねていきたいと考えています。
この取り組みは、猫のキモチを「分かったつもり」にならないための、最初の一歩だったのかもしれません。簡単に測れず、答えもすぐ出ない。けれどそうした複雑さこそが猫の魅力であり、もっと知りたいと願う理由でもあります。だからこそ、複数の手がかりを行き来しながら、猫をもっと丁寧に理解していく。そんな挑戦を、これからも続けていきます。
共同研究:塚原牧人、篠塚真仲、石川美沙(電通サイエンスジャム)
イラストレーション:根岸桃子(Neko Lab Tokyo)
お問い合わせ:neko-lab-tokyo@dentsu.co.jp
※掲載されている情報は公開時のものです
この記事は参考になりましたか?
この記事を共有
バックナンバー

著者

中村 恵
株式会社 電通
CXクリエイティブセンター ファンダムクリエイティブ部
デジタルクリエイティブプランナー
デジタルクリエイティブプランナー福岡県久留米市出身。多摩美術大学統合デザイン学科卒業。無意識の感覚や認知を起点に既存技術を再解釈し、新たな体験価値を創出するデザインを探究しています。
この人の記事


宮下 良介
株式会社 電通
第5CRプランニング局 Dentsu Lab Tokyo 5B部
アートディレクター/クリエイティブ・ディレクター
ジャンルを問わず、アートディレクションの力を生かしたユニークな体験設計を得意とする。生き物とは無縁の生活から繁殖引退猫との出会いを機に社内ラボ「Neko Lab Tokyo」を立ち上げる。主な仕事にYKK AP「窓を考える会社」、宝島社「死ぬときぐらい好きにさせてよ」、「ブルーピリオド展」、「ヒュー!日向」など。国内外の広告賞受賞少数。
